在大多数线性代数课程中,矩阵是课程的核心。而在机器学习中,我们则始终与矩阵打交道。问题是:矩阵并不能说明一切。仅仅看矩阵很难理解其中的规律。例如,为什么矩阵乘法的定义如此复杂?为什么像\(𝐵 = 𝑇^{−1}𝐴𝑇\)这样的关系很重要?为什么有些矩阵可逆,而有些则不可逆?
为了真正理解其中的奥秘,我们必须探究矩阵的起源:线性变换。
本文的主要内容包括:
- 什么是线性变换?
- 线性变换和矩阵
- 矩阵运算回顾
- 逆线性变换
- 核与像
“我的眼睛为什么会痛?” “你以前从来没用过。” ——莫菲斯第一次从“母体”醒来时对尼奥说
我们必须探究矩阵的起源:线性变换。就像尼奥一样,理解其中的奥秘可能会有点痛苦,但它会在以后给我们带来巨大的回报。让我们开始吧!
1 什么是线性变换?
随着内积、正交性和正交/标准正交基的引入,我们对特征空间的结构有了全面的了解。然而,在机器学习中,我们的兴趣主要在于数据的变换。
从这个角度来看,神经网络只是一个由更小的部分(称为层)组成的函数,每一步都将数据变换到一个新的特征空间。线性变换是机器学习模型的关键组成部分之一。
你可能见过形式为𝑓 (𝐱) = 𝐴𝐱的函数,但这只是看待它们的其中一种方式。本节将从几何角度开始,然后转向你可能已经熟悉的代数表示。为了理解神经网络如何学习强大的高级数据表示,了解变换的几何学至关重要。
那么,什么是线性变换?让我们不要犹豫,立即进入定义!
定义 4.1.1(线性变换)
设 𝑈 和 𝑉 是两个向量空间(在同一个标量场上),𝑓 ∶ 𝑈 → 𝑉 是它们之间的函数。如果满足以下条件,则称 𝑓 是线性的
对所有向量 𝐱、𝐲 ∈ 𝑈 和所有标量 𝑎、𝑏成立。

这就是线性代数被称为线性代数的原因。本质上,线性变换是两个向量空间之间的映射,它保留了代数结构:加法和标量乘法。(向量空间之间的函数通常被称为变换,因此我们将使用这个术语。)
备注 4.1.1 线性本质上是将两个性质合二为一:对于所有向量 𝐱、𝐲 和所有标量 𝑎,𝑓 (𝐱 + 𝐲) = 𝑓 (𝐱) + 𝑓 (𝐲) 和 𝑓 (𝑎𝐱) = 𝑎𝑓 (𝐱)。由此可知 (4.1)可进一步写成

从定义中可以立即看出两个性质。首先,由于
𝑓 (𝟎) = 𝟎 对每个线性变换都成立。此外,线性变换的复合仍然是线性的,正如
显示了任何线性 𝑓 和 𝑔 以及标量 𝑎 和 𝑏。
像往常一样,让我们看一些例子来建立直觉。
例 1. 对于任何标量 𝑐,缩放变换 𝑓 (𝐱) = 𝑐𝐱 是线性的
这可能是最简单的例子,它可以在所有向量空间中定义。
图 4.1:缩放作为线性变换
很容易看出缩放是线性的:
例 2. 在\(ℝ^2\)中,绕原点旋转𝛼角度也是线性的
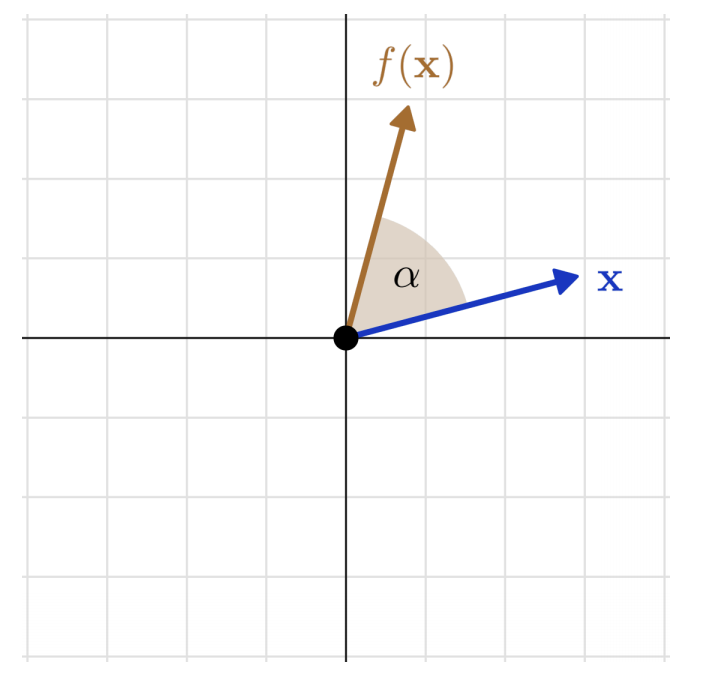
图 4.2:欧氏平面中的旋转作为线性变换
为了证明旋转确实是线性的,我们先直接看一个定义:平面向量\(𝐱 = (𝑥_1, 𝑥_2)\) 的旋转角为 𝛼,其表达式为

由 (4.1) 式很容易得到证明。我知道这看起来有点突然,但相信我,旋转公式将会详细解释。你可以用一些基本的三角学知识来解释,或者等到我们稍后用矩阵来解释。
一般来说,线性变换与空间几何有着密切的联系。稍后,我们将详细研究\(ℝ^2\)的线性变换,重点关注像这样的几何变换。(注意,旋转在高维空间中会稍微复杂一些,因为它们需要一个旋转轴。)
例3:在任何向量空间𝑉和非零向量𝐯∈𝑉中,由𝑓 (𝐱) = 𝐱 + 𝐯定义的平移不是线性的,正如𝑓 (𝟎) = 𝐯 ≠ 𝟎。
我们将在本节后面看到更多示例。现在,我们来讨论线性变换的一些一般性质。对于任何线性变换 𝑓 ∶ 𝑈 → 𝑉,图像

始终是𝐕的子空间(参见第 1.2.7 节)。这很容易验证:如果 \(𝐯_1, 𝐯_2 ∈ im 𝑓\),则存在 \(𝐮_1, 𝐮_2 ∈ 𝑈\),使得 \(𝑓 (𝐮_1) = 𝐯1\) 且 \(𝑓 (𝐮_2) = 𝐯_2\),如下式所示

为了增加一个抽象层次,我们将看到所有线性变换的集合形成一个向量空间。
定理 4.1.1 设 𝑈 和 𝑉 是同一域 𝐹 上的两个向量空间。则所有线性变换的集合
也是 𝐹 上的向量空间,具有函数加法和标量乘法的通常定义。

它的证明只是一个枯燥的清单,只是简单回顾了向量空间定义(定义 1.1.1)中的各项内容。我建议你至少过一遍,巩固一下对向量空间的理解,但其实没什么特别的。
1.1 线性变换和矩阵
正如我们所见,线性变换的定义有点抽象。然而,有一种简单而富有表现力的方法来刻画它们。
为了说明这一点,设 𝑓 ∶ 𝑈 → 𝑉 是两个向量空间 𝑈 和 𝑉 之间的线性变换。假设\(\{𝐮_1, … , 𝐮_𝑚\}\) 是 𝑈 中的基,而 \(\{𝐯_1, … , 𝐯_𝑛\}\) 是 𝑉 中的基。由于每个 𝐱 ∈ 𝑈 都可以写成如下形式
𝑓 的线性意味着
.png)
这意味着\(𝑓 (𝐱)\) 是\(𝑓 (𝐮_1), … , 𝑓 (𝐮_𝑚)\) 的线性组合。换句话说,每个线性变换都完全由基向量的像决定。为了扩展这个想法,假设对于每个\(𝐮_𝑗\),对于某些标量\(𝑎_{𝑖,𝑗}\),我们有
这些𝑛 × 𝑚 数完全描述了𝑓。为了符号简单,我们将它们存储在一个𝑛 × 𝑚 大小的表中,称为矩阵,我们将其表示为\(𝐴_𝑓\):
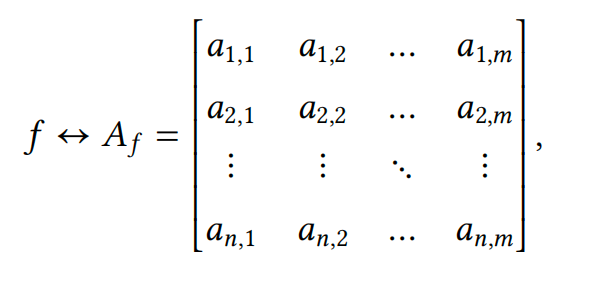
这意味着线性变换可以用矩阵来表示。这种联系在机器学习中被广泛应用。
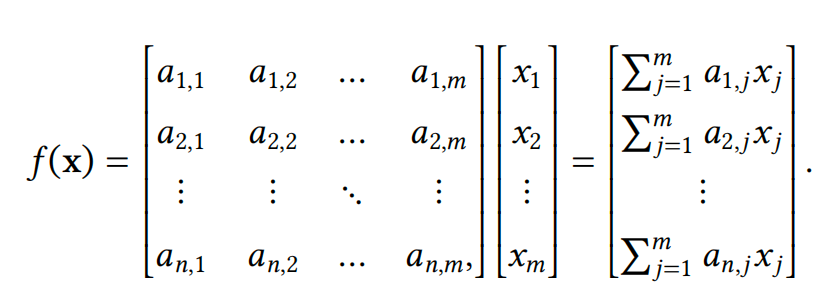
进一步展开(4.3),对于每个\(𝐱 = ∑^𝑚_{𝑗=1} 𝑥_𝑗𝐮_𝑗\),我们有

因此,𝐱 的图像可以表示为\(𝐴_𝑓 𝐱\):
这里需要注意两点。首先,我们隐式地选择将向量表示为列而不是行。这是一个影响深远的决定,将影响本书后面的许多计算。我们会继续指出这一点。
其次,矩阵表示取决于基的选择!假设\(𝑃 = \{𝐩_1, … , 𝐩_𝑛\} ⊂ 𝑈\) 是矩阵的基,我们将这种依赖关系表示为下标,写作\(𝐴_{𝑓,𝑃}\)。
为了避免混淆,我们几乎只用标准正交基来定义线性变换。在实际场景中,这更容易理解正在发生的事情。所以,每当我写下“设𝐴是线性变换𝑓的矩阵”这样的话,就隐含地假设了𝐴的基函数形式为\(𝐞_1 = (1, 0, … , 0), 𝐞_2 = (0, 1, … , 0), … , 𝐞_𝑛 = (0, 0, … , 1)\)。
从哲学角度来说,你听说过柏拉图的洞穴寓言吗?在这个思想实验中,人们被假设生活在一个洞穴中,始终面朝一面墙,只能观察身后火焰投射的影子。他们所观察到的并用来构建世界内部表征的东西,与现实截然不同。将这个类比应用到线性代数中,矩阵就是我们在实际场景中观察和使用的影子。在许多入门课程中,线性变换是隐藏的,只教授矩阵微积分。我第一次接触这个主题的经历也类似:我上的第一门线性代数课就只讲矩阵。这门课复杂得令人困惑,简直是数学课里最复杂的了。(我可以向你保证,这门课确实非常复杂和令人困惑。)后来,当我发现可以从线性变换的角度来看待矩阵时,一切都豁然开朗了。
不了解矩阵背后的原理,就不可能掌握线性代数。如果你觉得我的方法太抽象,请记住:多年以后,当你成为一名实践数据科学家/机器学习工程师/研究员或其他任何职位时,深入研究这些原理将会带来巨大的回报。
让我们回到正题,继续讨论线性变换。最常用的矩阵是恒等变换 id ∶ 𝐱 ↦ 𝐱 的矩阵。我们将其表示为 𝐼。很容易看出
.png)
总而言之,对于矩阵 𝐴,线性变换可以通过 𝐱 ↦ 𝐴𝐱 给出。实际上,映射
定义了由 (4.2) 定义的线性变换空间 𝐿(𝑈, 𝑉) 与 𝑛 × 𝑚 矩阵集之间的一一对应关系,其中 𝑛 和 𝑚 是对应的维度。
1.2 矩阵运算回顾
函数可以相加和复合。由于线性变换和矩阵之间的联系,矩阵运算继承自相应的函数运算。
基于这一原则,我们定义了矩阵加法,使得两个线性变换之和的矩阵等于对应矩阵之和。
从数学上讲,如果 𝑓 , 𝑔 ∶ 𝑈 → 𝑉 是两个带矩阵的线性变换,𝑓 ↔︎ 𝐴 和 𝑔 ↔︎ 𝐵,那么

因此,相应的矩阵可以按元素相加:
矩阵之间的乘法由相应变换的组合来定义。
为了弄明白如何操作,我们先研究一个特殊情况。(一般来说,先研究特殊情况是个好主意,因为它们通常可以降低复杂性,并让你在不造成信息过载的情况下发现规律。)因此,设 𝑓 , 𝑔 ∶ 𝑈 → 𝑈 为两个线性变换,将 𝑈 映射到自身上。为了确定与𝑓 ◦ 𝑔 对应的矩阵元素,我们必须用所有基向量 \(𝐮_1, … , 𝐮_𝑛\) 来表示 \(𝑓 (𝑔(𝐮_𝑗))\)。为此,我们有

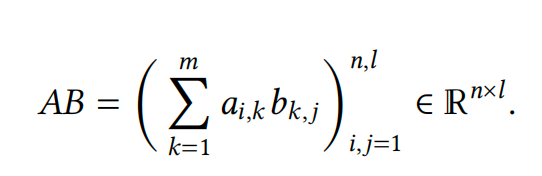
考虑我们如何定义变换矩阵,标量$ (∑^𝑛_{𝑘=1} 𝑎_{𝑖,𝑘}𝑏_{𝑘,𝑗}) $是 𝑓 ◦ 𝑔 矩阵第 𝑖 行第 𝑗 列的元素。因此,矩阵乘法可以定义为
一般情况下,只有当相应的线性变换可以组合时,我们才能定义矩阵的乘积。也就是说,如果𝑓 ∶ 𝑈 → 𝑉,则𝑔 必须从𝑉开始。将其转化为矩阵的语言,𝐴 的列数必须与𝐵 的行数匹配。因此,对于任何\(𝐴 ∈ ℝ^{𝑛×𝑚}\) 和\(𝐵 ∈ ℝ^{𝑚×𝑙}\),它们的乘积定义为
1.3 逆线性变换
对于线性变换,可逆性问题非常重要。例如,你遇到过这样的方程组吗?
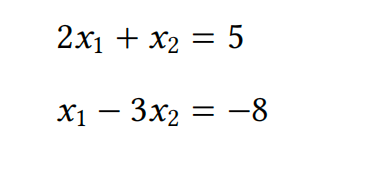
如果我们定义
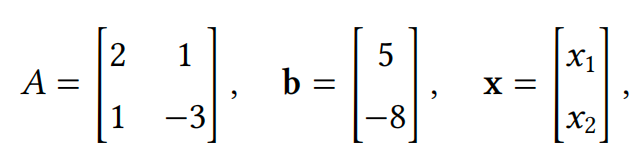
上述系统可以写成𝐴𝐱 = 𝐛的形式。这些被称为线性方程,用于建模从金融到生物学的各种过程。你会如何写出这样一个方程的解?如果存在一个矩阵\(𝐴^{-1}\),使得\(𝐴^{-1}𝐴\)是单位矩阵𝐼(由(4.4)式定义),那么将方程𝐴𝐱 = 𝐛从左乘以\(𝐴^{-1}\),将得到\(𝐱 = 𝐴^{-1}𝐛\)形式的解。
矩阵\(𝐴^{-1}\)被称为𝐴的逆矩阵。它可能并不总是存在,但当它存在时,由于多种原因,它极其重要。我们稍后会讨论线性方程,但首先,让我们学习一下可逆性的基础知识!以下是一般定义。
定义 4.1.2(线性变换的逆)
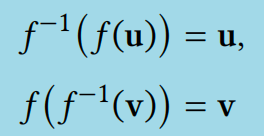
设 𝑓 ∶ 𝑈 → 𝑉 是向量空间 𝑈 和 𝑉 之间的线性变换。如果存在一个线性变换 \(𝑓^{-1}\) 使得 \(𝑓^{-1}◦ 𝑓\) 和 \(𝑓 ◦ 𝑓^{-1}\) 为恒等函数,则称 𝑓 可逆;即
对所有𝐮∈𝑈、𝐯∈𝑉成立。 \(𝑓^{-1}\)称为𝑓的逆。
并非所有线性变换都是可逆的。例如,如果𝑓将所有向量映射到零向量,则无法定义逆变换。
逆变换的存在需要满足某些条件。其中最重要的一个条件是将基的概念与可逆性联系起来。
定理 4.1.2(线性变换的可逆性)
设 𝑓 ∶ 𝑈 → 𝑉 为线性变换,\(𝐮_1, … , 𝐮_𝑛\) 为 𝑈 中的基。则 𝑓 可逆当且仅当$𝑓 (𝐮_1), … , 𝑓 (𝐮_𝑛) $为 𝑉 中的基。
以下证明很简单,但可能有点让人一时无法接受。第一次阅读时可以跳过,以后可以随时重新阅读。
证明。与往常一样,“当且仅当"这类定理的证明由两部分组成,因为这些命题涉及两个蕴涵式。
- 首先,我们证明𝑓可逆,则$𝑓 (𝐮_1), … , 𝑓 (𝐮_𝑛) \(是一个基。也就是说,我们需要证明\)𝑓 (𝐮_1), … , 𝑓 (𝐮_𝑛)$ 线性无关,且每个𝐲 ∈ 𝑉都可以写成它们的线性组合。由于𝑓可逆,𝑓 (𝟎) = 𝟎,而且不存在非零向量𝐱 ∈ 𝑈 使得𝑓 (𝐱) = 𝟎。换句话说,𝟎 不能写成 $𝑓 (𝐮_1), … , 𝑓 (𝐮_𝑛) $的非平凡线性组合,由此定理 1.2.2推断出它们之间的线性独立性。
另一方面,可逆性意味着每个 𝐲 ∈ 𝑉 都可以表示为 𝐲 = 𝑓 (𝐱),其中 𝐱 ∈ 𝑈。(假设 \(𝐱 = 𝑓^{−1}(𝐲)\)。)由于 $𝐮_1, … ,𝐮_𝑛 \(是一个基,\)𝐱 = ∑^𝑛_{𝑖=1} 𝑥_𝑖𝐮_𝑖$。因此,
可以证明 \(span(𝑓 (𝐮_1), … , 𝑓 (𝐮_𝑛)) = 𝑉\)。
$𝑓 (𝐮_1), … , 𝑓 (𝐮_𝑛) $的线性独立性以及它张成 𝑉 的事实表明它确实是基。
- 现在我们证明另一个蕴涵式:如果 \(𝑓 (𝐮_1), … , 𝑓 (𝐮_𝑛)\) 是基,则 𝑓 可逆。
如果$ 𝑓 (𝐮_1), … , 𝑓 (𝐮_𝑛) $确实是基,则每个 𝐲 ∈ 𝑉 都可以写成
这证明了全射性。关于单射性,如果对于某个𝐚,𝐛∈𝑈,𝐲 = 𝑓 (𝐚) = 𝑓 (𝐛),那么,由于𝐚 和 𝐛 都可以写成\(𝐮_𝑖\)基向量的线性组合,因此我们有
和
因此,\(𝟎 = ∑^𝑛_{𝑖=1}(𝑎_𝑖 − 𝑏_𝑖)𝐮_𝑖\),且由于$𝐮_1, … , 𝐮_𝑛 \(是 U 中的一个基,\)𝑎_𝑖 = 𝑏_𝑖$ 必定成立。因此𝑓 是单射。

该定理的一个推论是,如果𝑈和𝑉的维数不同,则线性变换𝑓 ∶ 𝑈 → 𝑉不可逆。我们也可以从矩阵的角度来看待可逆性。对于任何\(𝐴 ∈ ℝ^{𝑛×𝑛}\),如果相应的线性变换可逆,则存在一个矩阵\(𝐴^{−1} ∈ ℝ^{𝑛×𝑛}\)使得\(𝐴^{−1}𝐴 = 𝐴𝐴^{−1} = 𝐼\)。如果一个矩阵不是方阵,那么它在经典意义上不可逆。
1.4 核与像
关于线性变换的可逆性,有两个特殊的集合起着至关重要的作用:核和像。让我们来看一下!
定义 4.1.3(线性变换的核和像)
设 𝑓 ∶ 𝑈 → 𝑉 为线性变换。其像和核定义为
和

通常,我们将某个矩阵 𝐴 写为 im 𝐴 和 ker𝐴,指的是由 𝐱 ↦ 𝐴𝐱 定义的线性变换。
由于 𝑓 的线性性,很容易看出 im 𝑓 是 𝑉 的子空间,而 ker 𝑓 是 𝑈 的子空间。如上所述,它们与可逆性密切相关,我们接下来会看到。
定理 4.1.3(线性变换的可逆性)
设 𝑓 ∶ 𝑈 → 𝑉 为线性变换。
(a)𝐴 为单射当且仅当 ker 𝑓 = {𝟎}。
(b)𝐴 为全射当且仅当 im 𝑓 = 𝑉。
(c)𝐴 为双射(即可逆),当且仅当 ker 𝑓 = {𝟎} 且 im 𝑓 = 𝑉。
证明:(a) 如果 𝑓 是单射,则 𝑈 中只能有一个向量映射到 𝟎。由于对于任何线性变换,𝑓 (𝟎) = 𝟎,因此 ker 𝑓 = {𝟎}。另一方面,如果有两个不同的向量 𝐱,𝐲 ∈ 𝑈,使得 𝑓 (𝐱) = 𝑓 (𝐲),则 𝑓 (𝐱 − 𝐲) =𝑓 (𝐱) − 𝑓 (𝐲) = 𝟎,因此 𝐱 − 𝐲 ∈ ker 𝑓。因此,ker 𝑓 = {𝟎} 蕴涵 𝐱 = 𝐲,从而给出单射性。 (b)这只是全射性的定义。
(c)这是由上面(a)和(b)的结合立即得出的。
因为矩阵定义了线性变换,所以讨论矩阵的逆是有意义的。
从代数角度来说,\(𝐴 ∈ ℝ^{𝑛×𝑛}\)的逆是矩阵\(𝐴^{−1} ∈ ℝ^{𝑛×𝑛}\),使得\(𝐴^{−1}𝐴 = 𝐴𝐴^{−1} = 𝐼\)成立。线性变换和矩阵之间的联系意味着\(𝐴^{−1}\) 是\(𝑓^{−1}\)的矩阵,所以这并不奇怪。
如果本节关于可逆性的内容感觉涉及太多代数,不用担心。稍后,在讨论变换的行列式时,我们将在本章后面从几何角度研究可逆性。关于矩阵,稍后我们将在5.1.6节中看到计算逆矩阵的通用方法。我们很快就会讲到这一点,但首先,我们先来看看基的选择如何决定矩阵的表示。